
原文链接https://support.unitree.com/home/zh/Algorithm_Practice/quickstart
环境准备和软件包安装
melodic 版 ROS 系统安装
1. 配置 Ubuntu 软件源
首先确保你的系统允许 "restricted"、"universe" 和 "multiverse" 仓库(通常默认已开启),然后添加 ROS 的软件源: sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2. 添加密钥
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
3. 更新软件包索引
sudo apt update
4.安装ROS Melodic完整版
sudo apt install ros-melodic-desktop-full
5. 初始化 rosdep(关键步骤)
rosdep 用于安装 ROS 包的依赖,必须初始化: sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential sudo rosdep init rosdep update
6. 设置环境变量(自动生效)
将 ROS 环境变量添加到 bash,避免每次终端都手动配置: echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc source ~/.bashrc
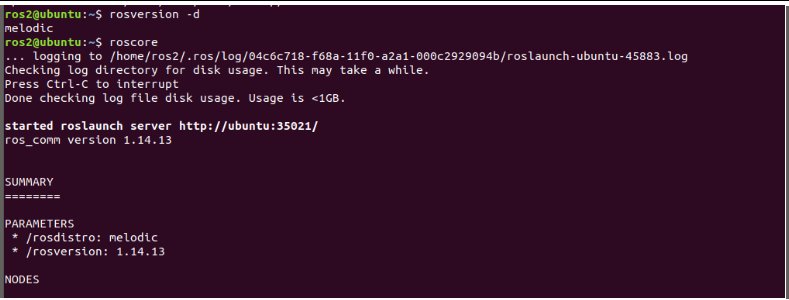
7. 验证安装
rosversion -d 正常输出:melodic
测试核心工具
roscore
8.下载宇树机器人项目代码
先创建工作空间
cd ~
mkdir ros2_demo
cd ros2_demo
mkdir -p demo1/src
cd demo1
cd src
将项目拉取下来
先安装git
sudo apt install git
有条件挂个代理
示例
export ALL_PROXY="socks5://192.168.126.1:7897"
拉取代码
git clone https://github.com/unitreerobotics/unitree_guide.git
git clone https://github.com/unitreerobotics/unitree_ros.git
git clone https://github.com/unitreerobotics/unitree_ros_to_real.git
注意!!!!
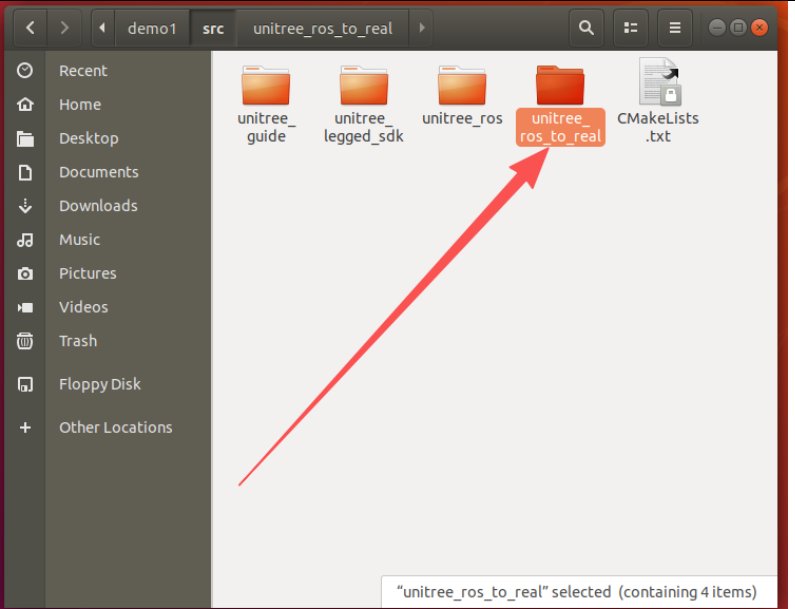 需要将此文件夹下的
需要将此文件夹下的
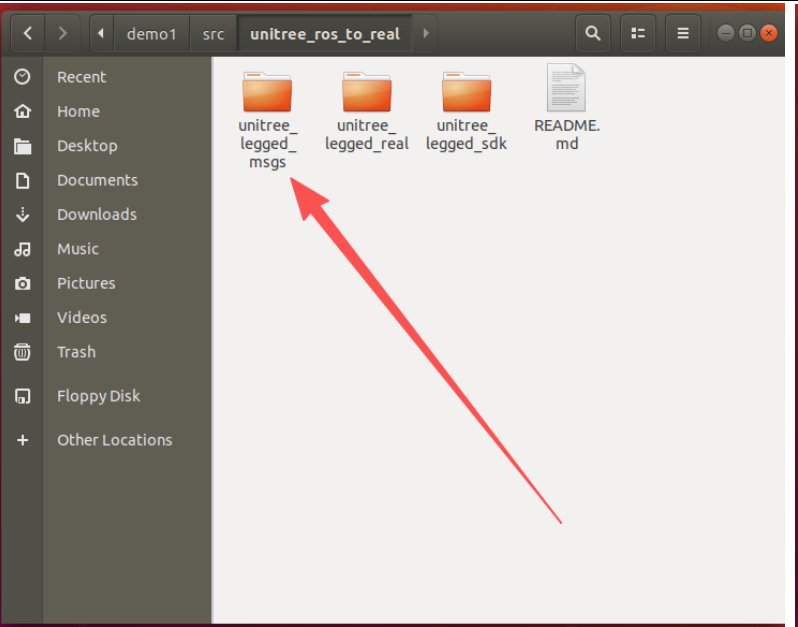 此文件夹,移动至上一目录,后将
此文件夹,移动至上一目录,后将unitree_ros_to_real文件夹删除或者备份删除
切到项目空间cd /home/ros2/ros2_demo/demo1
编译前安装依赖
sudo apt update
sudo apt install ros-melodic-gazebo-ros ros-melodic-gazebo-ros-control ros-melodic-gazebo-plugins
sudo apt install ros-melodic-xacro ros-melodic-robot-state-publisher ros-melodic-gazebo-ros-control
sudo apt install ros-melodic-urdf ros-melodic-urdf-parser-plugin ros-melodic-urdfdom-py
sudo apt install liburdfdom-dev liburdfdom-headers-dev
sudo apt install ros-melodic-tf ros-melodic-tf2 ros-melodic-tf2-ros
sudo apt install ros-melodic-controller-manager ros-melodic-ros-control ros-melodic-ros-controllers
sudo apt install ros-melodic-robot-state-publisher
git clone https://github.com/unitreerobotics/unitree_legged_sdk.git
sudo apt install ros-melodic-gazebo-ros ros-melodic-gazebo-ros-control ros-melodic-gazebo-plugins
sudo apt install ros-melodic-move-base-msgs ros-melodic-navigation
后续有如图的报错
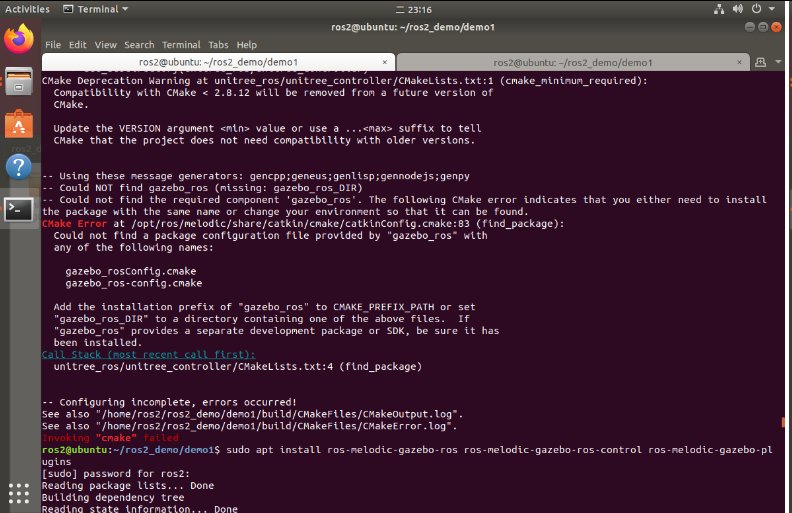 这类依赖问题在编译第三方 ROS 包时很常见。如果之后还遇到类似
这类依赖问题在编译第三方 ROS 包时很常见。如果之后还遇到类似 Could NOT find xxx 的错误,你可以用下面的命令来查找对应的包名:
apt search ros-melodic-xxx
把 xxx 替换成缺失的包名(比如这次的 tf),就能找到正确的安装包了。
如果有报错信息,无报错后需要清理编译缓存
清理编译缓存
catkin_make clean
编译工程
catkin_make
1.运行 Gazebo 仿真环境:
在同一个终端中,执行下列命令:
source ./devel/setup.bash
然后执行下列命令来打开 Gazebo 仿真环境:
roslaunch unitree_guide gazeboSim.launch
由于是在虚拟机环境,如果必须要使用GUI
推荐直接以下优化
sudo apt update
sudo apt install libgl1-mesa-glx libgl1-mesa-dri mesa-utils
export SVGA_VGPU10=0
echo "export SVGA_VGPU10=0" >> ~/.bashrc && source ~/.bashrc #将其永久生效
gazebo
启动控制器
安装依赖 sudo apt install ros-melodic-xmlrpcpp cd ~/ros2_demo/demo1 ./devel/lib/unitree_guide/junior_ctrl 如果必须需要使用root用户加载ROS环境: sudo -E ./devel/lib/unitree_guide/junior_ctrl # -E 保留当前环境变量
简单使用
选中在上一步中用来启动控制器的终端,然后按下键盘上的 “2” 键。此时在 Gazebo 环境中的机器人会站起来,同时终端会显示 “Switched from passive to fixed stand”。
接下来同样选中该终端,然后按下键盘上的 “4” 键,在终端显示“按下键盘上的 “Switched from fixed stand to trotting”内容后,连续按两下键盘上的 “w” 键,机器人即可缓慢向前运动,按下键盘上的 “空格” 键,机器人则会停下来。
在仿真环境中,按下键盘上的 W A S D 键 分别控制机器人 前进 左平移 后腿 右平移。按下键盘上的 J L 键 分别控制机器人 左转 右转。