项目地址:https://github.com/vmayoral/robot_hacking_manual,https://github.com/aliasrobotics/aztarna
首先下载项目
下载靶场 git clone https://github.com/vmayoral/robot_hacking_manual.git cd ./robot_hacking_manual/2_writeups/1_reconnaissance/robot_footpring/tutorial1 下载aztarna探测工具 git clone https://github.com/aliasrobotics/aztarna.git
修改部分配置
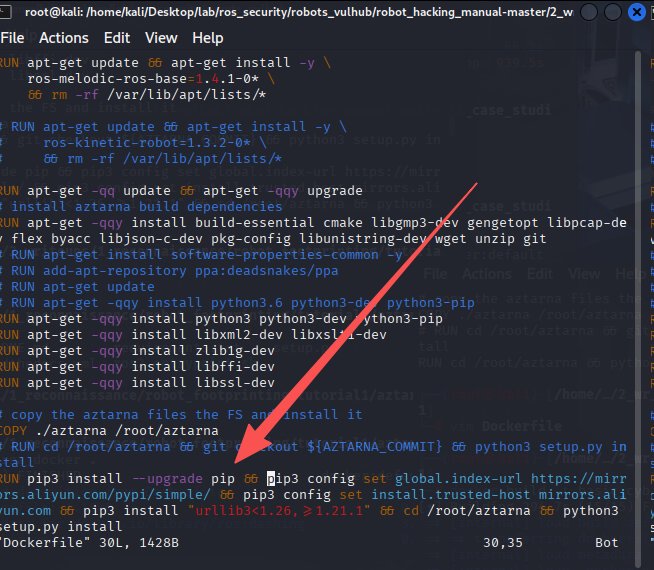
修改Dockerfile(网络和版本问题)
vim Dockerfile
将最后一段话替换成一下:
RUN pip3 install --upgrade pip && pip3 config set global.index-url https://mirrors.aliyun.com/pypi/simple/ && pip3 config set install.trusted-host mirrors.aliyun.com && pip3 install "urllib3<1.26,>=1.21.1" && cd /root/aztarna && python3 setup.py install
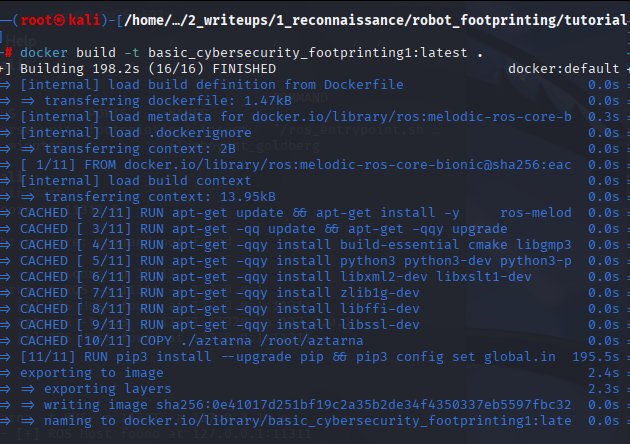
按照其教程构建启动环境
docker build -t basic_cybersecurity_footprinting1:latest .
 docker run --privileged -it basic_cybersecurity_footprinting1:latest
docker run --privileged -it basic_cybersecurity_footprinting1:latest
 开启
开启
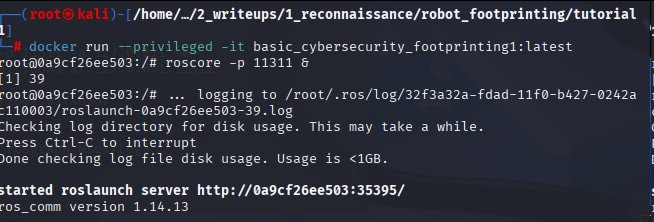
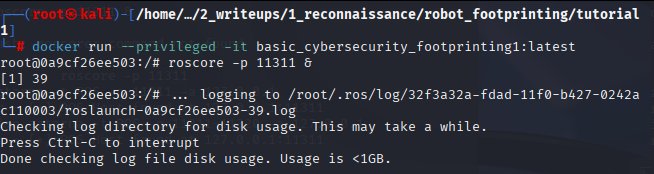 让我们在默认端口中启动一个ROS实例,然后查看如何aztarna能够检测它
roscore -p 11311 &
让我们在默认端口中启动一个ROS实例,然后查看如何aztarna能够检测它
roscore -p 11311 &
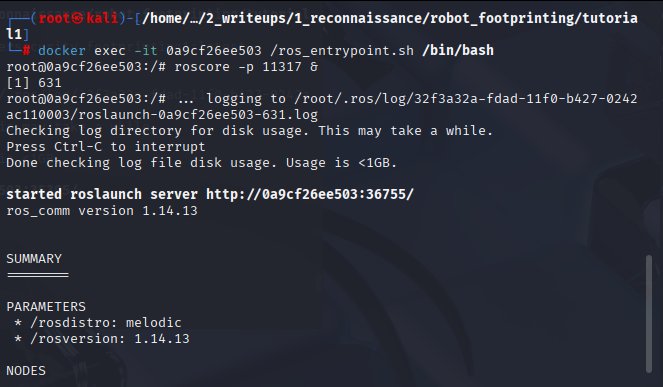
 roscore -p 11317 &
roscore -p 11317 &
开始进行探测
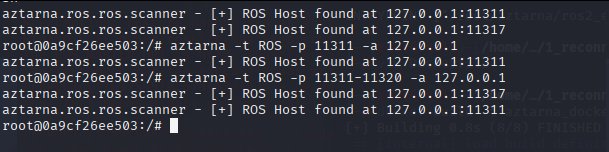
探测其默认端口11311
aztarna -t ROS -p 11311 -a 127.0.0.1
 探测成功
探测成功
 多端口探测
多端口探测
 下面进行本地部署aztarna进行机器人扫描
创建python虚拟环境
cd ~
mkdir ~/aztarna
python3.7 -m venv aztarna-venv
source ~/aztarna/aztarna-ven/bin/activate
在你自己的aztarna项目目录下进行安装 aztarna
python setup.py install
安装好了aztarna
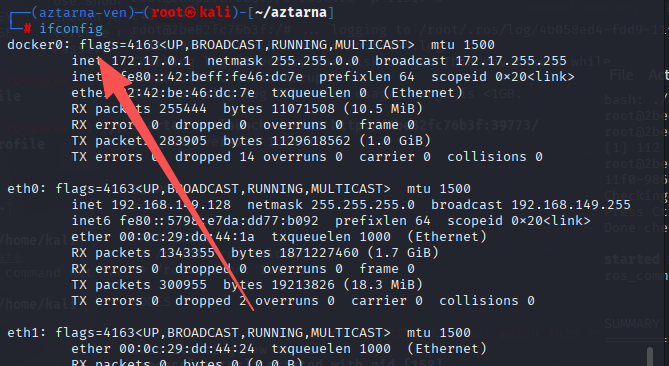
查看docker 内部ip
下面进行本地部署aztarna进行机器人扫描
创建python虚拟环境
cd ~
mkdir ~/aztarna
python3.7 -m venv aztarna-venv
source ~/aztarna/aztarna-ven/bin/activate
在你自己的aztarna项目目录下进行安装 aztarna
python setup.py install
安装好了aztarna
查看docker 内部ip
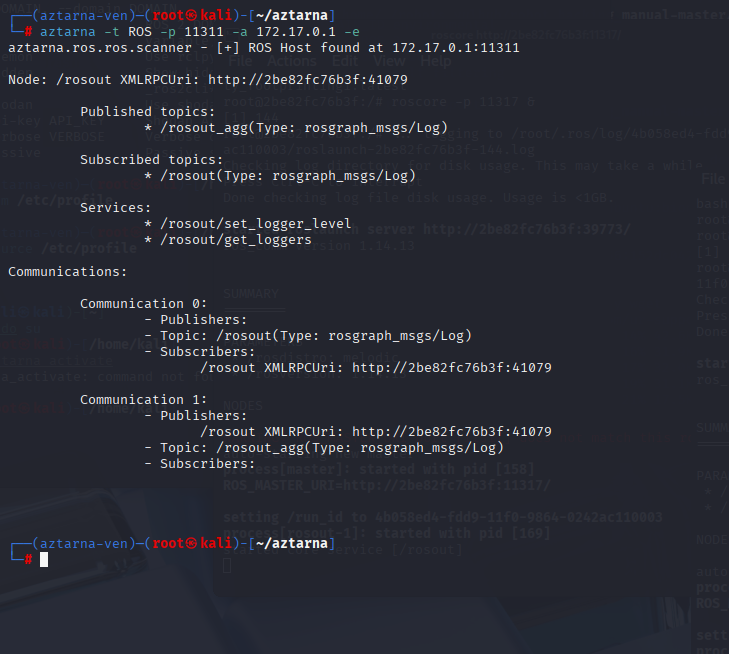
 对其进行使用
对其进行使用
 正常能够扫描和使用
正常能够扫描和使用